Robis
Home Lab
Improve the world
Stereo-Vision Adapter Board
CMOS cameras come in various forms sizes with all different bus interfaces. Some cameras embed the optical flow processors, video compressors, lense correction and other high level algorithms. Some other cameras provide the output in the Bayer pattern.
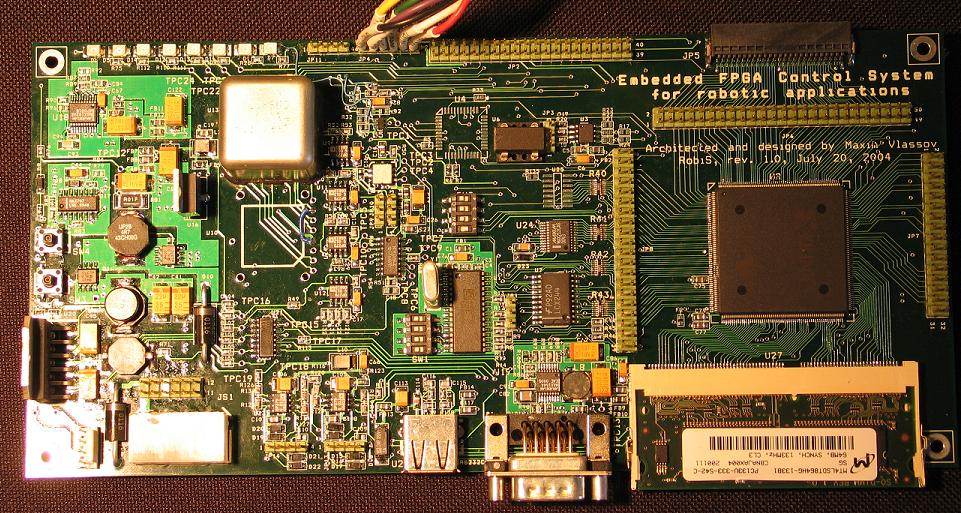
BINOCULUS synchronizes an array of video cameras all together and feeds the video data through the main video bus into the external frame grabber (video back-end FPGA platform, host processor, etc).
When connected to ROBIS it supplements the stereo-vision processor of ROBIS with a flexible video front-end making possible to adapt virtually any type of the modern CMOS camera sensor.
BINOCULUS houses 2 sets of connectors for 2 different camera module types.
 BINOCULUS_2
BINOCULUS_2
Also two BINOCULUS boards can be used to synchronize 4 independent camera sensors for the quad input machine vision system.